Fully 3D printed 6-dof robot arm
I designed a fully 3D-printed 6-DOF robotic arm for three primary reasons: to deepen my robotics knowledge, provide a platform for testing AI/ML algorithms, and for the sheer enjoyment of the challenge. Currently, this robot achieves point-to-point movement using polynomial splicing, controlled by a decentralized system. I experimented with both a simple stiffness controller and a Jacobian-based approach, but found the Arduino's limited memory and processing capacity to be a constraint. The entire project was completed at an approximate cost of $300 USD, including all electronic components.

Completed Robot Version 1.0

Rendered Solidworks image
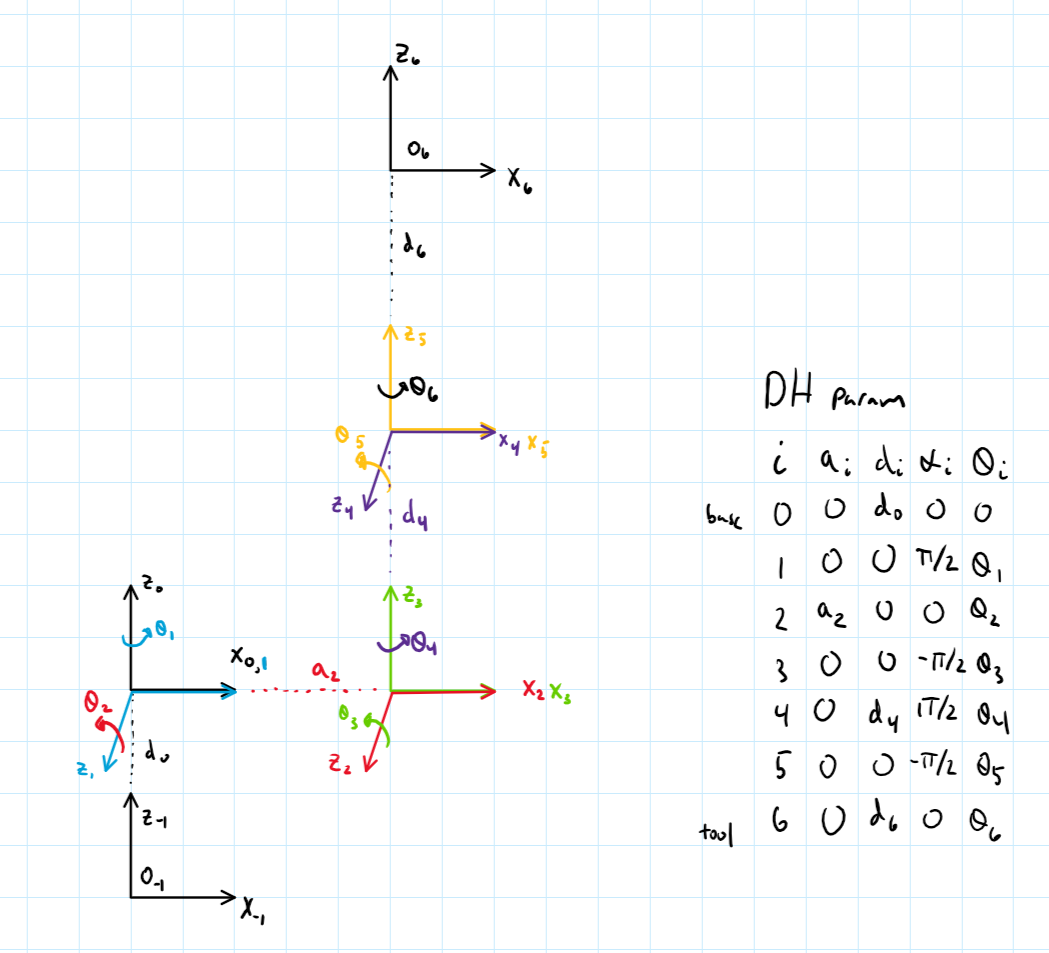
Zero-config and DH Params used for forward and inverse kinematics

Modular joints and actuators for simplicity

3D printed Slew Bearings (to cut cost)
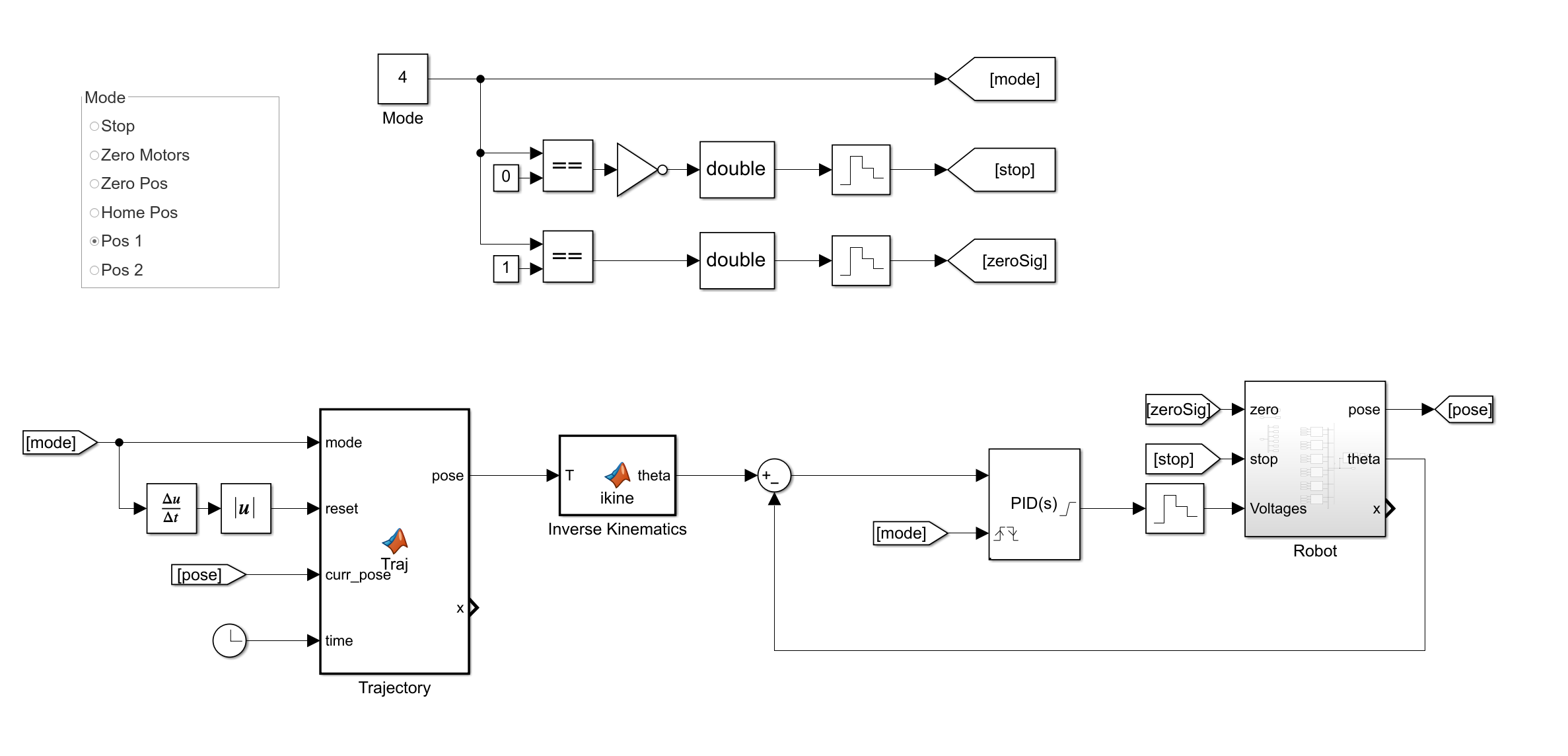
Decentralized controller Simulink
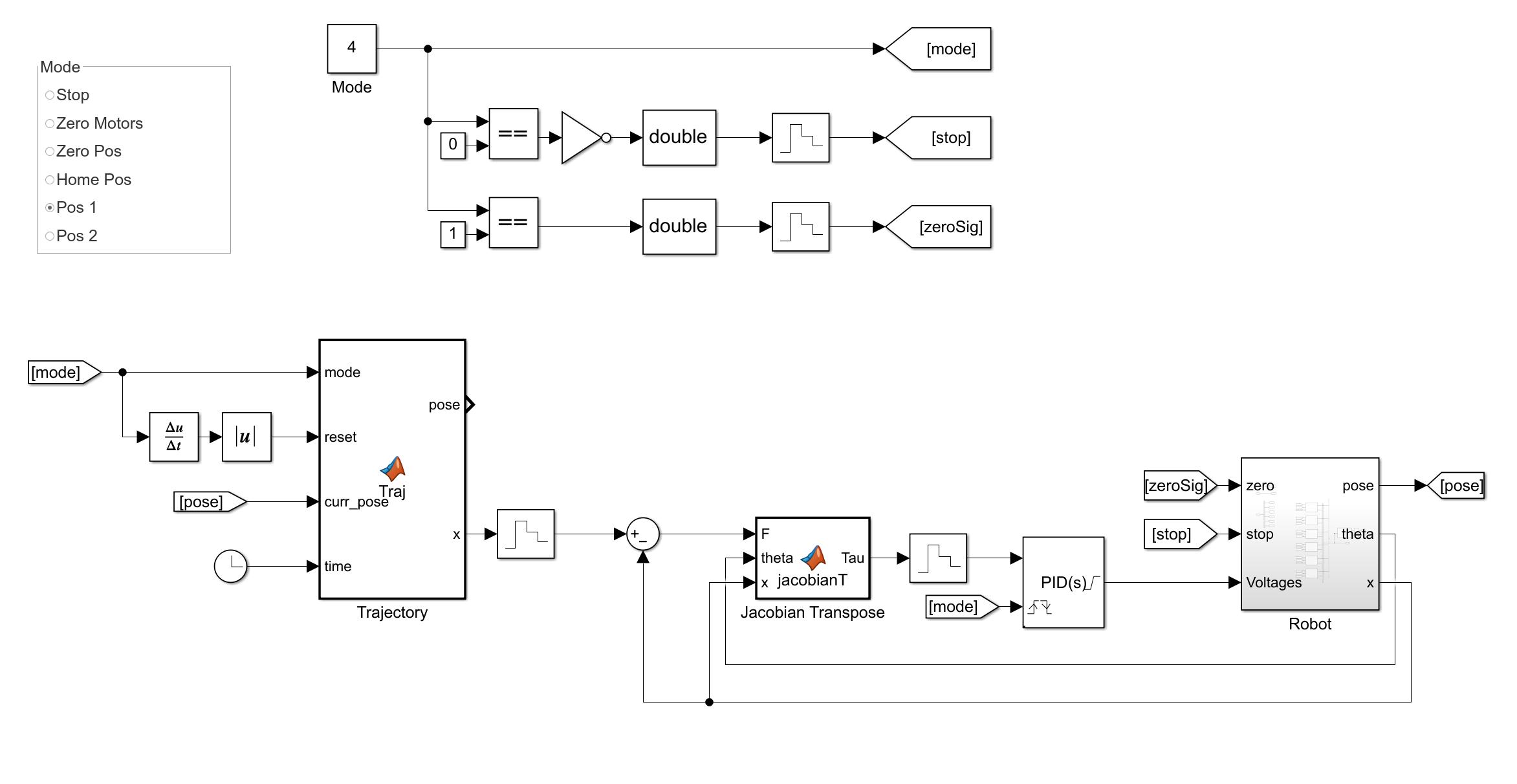
Stiffness Controller Simulink